

La mobilité est une question cruciale pour chacun d’entre nous.
Créer de la mobilité pour les robots de demain, ou redonner de la mobilité à des personnes qui en ont besoin fait partie des grands sujets de recherche scientifique, et ce depuis plusieurs années. Le textile est particulièrement étudié, car ce support souple, confectionné ou non, pourrait peut-être demain fournir cette aide, grâce à la récente création de «muscles textiles».
Une équipe de recherche collaborative vient par exemple d’annoncer avoir conçu un « robot » portable pour soutenir l’articulation de la hanche d’une personne en marchant. L’équipe, dirigée par Minoru Hashimoto, professeur de science et technologie du textile à l’Université de Shinshu au Japon, a publié les détails de son prototype dans le journal Smart Materials and Structures . Le système portable se compose de gel de polychlorure de vinyle (PVC) plastifié, d’électrodes à mailles et d’une tension appliquée. L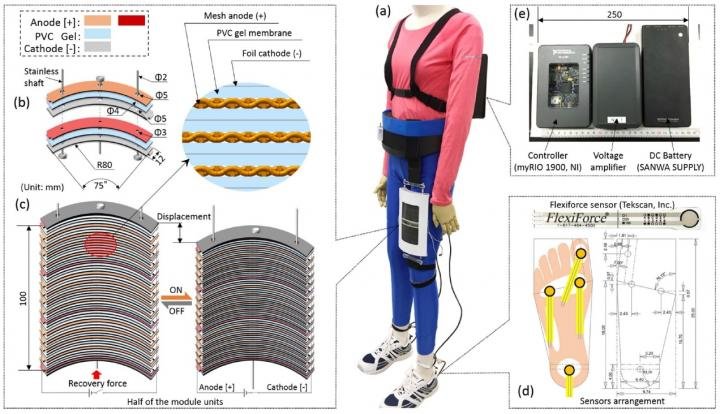 e maillage des électrodes prennent en sandwich le gel, et celui-ci fléchit et se contracte lors de l’application de la tension, comme un muscle. Dans une évaluation préliminaire, un patient atteint d’un AVC présentant une certaine paralysie d’un côté de son corps a testé la marche avec le système portable, avec une amélioration certaine et des résultats positifs. Les chercheurs prévoient maintenant de créer un fil actionneur utilisant le gel de PVC, ce qui pourrait potentiellement conduire au développement d’un tissu capable de fournir un soutien musculaire externe plus facilement exploitable.
e maillage des électrodes prennent en sandwich le gel, et celui-ci fléchit et se contracte lors de l’application de la tension, comme un muscle. Dans une évaluation préliminaire, un patient atteint d’un AVC présentant une certaine paralysie d’un côté de son corps a testé la marche avec le système portable, avec une amélioration certaine et des résultats positifs. Les chercheurs prévoient maintenant de créer un fil actionneur utilisant le gel de PVC, ce qui pourrait potentiellement conduire au développement d’un tissu capable de fournir un soutien musculaire externe plus facilement exploitable.
D’autres prototypes ont déjà vu le jour. L’année dernière, en utilisant une combinaison de fil de nylon ordinaire et d’encre conductrice, les scientifiques du MIT américain avaient réussi créé des muscles artificiels capables des mouvements, comme un tissu musculaire naturel. Créé par la manipulation de fibres de nylon dans un processus de fabrication relativement simple, le nouveau matériau réagit à la chaleur en contraction dans sa longueur et en expansion dans sa circonférence. De cette façon, lorsqu’une source de chaleur est appliquée, par exemple en utilisant de l’encre conductrice qui réchauffe les filaments de nylon grâce à la tension appliquée, les chercheurs ont démontré que les nouveaux « muscles » sont capables d’une performance fiable même après 100 000 cycles de flexion, en restant capables de se plier plus de 17 fois par seconde.
Autre voie de développement aux États-Unis, en 2016, une équipe de l’Alan G. MacDiarmid NanoTech Institute de l’Université du Texas a décrit une méthode pour développer une nouvelle classe de « muscles artificiels » fabriqués à partir de fibres très torsadées issues de matériaux divers, allant des nanotubes de carbone au fil de fil de pêche en nylon. La torsion du fil permet d’obtenir des « muscles artificiels » qui peuvent tourner comme un rotor à plus de 100.000 tours par minute. Lorsque la torsion est importante, le muscle se contracte de façon spectaculaire tout le long de sa longueur lorsqu’il est chauffé, et retourne à sa longueur initiale lorsqu’il est refroidi. Une application potentielle pourrait être des vêtements sensibles à la chaleur, en adaptant le pouvoir isolant du vêtement en réponse à la température extérieure grâce à des bobines de fils torsadés.
Plus récemment, dans une étude menée à l’Université Linköping de Suède et à l’Université de Borås, les scientifiques ont enduit des fils de cellulose fabriqués en masse avec un polymère électroactif flexible connu sous le nom de polypyrrole. Lorsqu’une faible tension est appliquée au polymère, elle augmente en volume, ce qui amène les fibres de fil à augmenter en longueur en conséquence; lorsque le courant électrique est coupé, les fibres se rétractent à leur longueur d’origine. En variant la manière dont ces fibres sont tissées ensemble, il est possible d’accorder la force du matériau vers différentes tâches.
En 2017 toujours, des chercheurs de l’Université de Columbia avaient présenté un muscle artificiel souple imprimé en 3D. Fonctionnant tout à fait comme un véritable muscle humain, ce muscle artificiel en élastomère de silicone biocompatible (à base de PDMS, polydiméthylsiloxane) renferme des microbulles d’éthanol. Une résistance basse tension va faire bouillir l’éthanol (température d’ébullition Téb = 78,4°C) et provoquer une forte variation volumique de l’élastomère, ce qui va actionner le muscle. Avec une élasticité 15 fois supérieure à celle du muscle humain, ce muscle artificiel serait capable de soulever jusqu’à 1 000 fois son propre poids.
Des scientifiques de l’Université Carnegie Mellon ont quant à eux créé un caoutchouc hautement conducteur de la chaleur, connu sous le nom de «thubber» afin de pallier au problème de la dissipation de chaleur inhérente à l’électronique flexible.
 Enfin, très récemment, une équipe de la Cornell University a conçu un exosquelette robotique qui est capable de modifier rapidement sa forme selon un stimulus chimique, électrique ou thermique dans son environnement. Il s’agit d’un système musculaire bimorphe associant du graphène à de l’aluminium enduit d’une couche nanométrique de silice, se comportant comme un origami . Les dispositifs élaborés seraient compatibles avec les procédés de fabrication des matériaux semi conducteurs, pour les robots de demain.
Enfin, très récemment, une équipe de la Cornell University a conçu un exosquelette robotique qui est capable de modifier rapidement sa forme selon un stimulus chimique, électrique ou thermique dans son environnement. Il s’agit d’un système musculaire bimorphe associant du graphène à de l’aluminium enduit d’une couche nanométrique de silice, se comportant comme un origami . Les dispositifs élaborés seraient compatibles avec les procédés de fabrication des matériaux semi conducteurs, pour les robots de demain.
Toutes ces tentatives -et bien d’autres encore- semblent prometteuses, et même si pour la plupart elles sont encore beaucoup trop chères pour les applications courantes, le potentiel est bien réel pour la robotique du futur et l’internet des objet (IoT).
Source: IFTH – le 15/01/18